While a majority of HARD members work on the current version of our first electric car, the HRD05, some are propelling themselves into the future, creating the systems that will one day drive our babies. They are the Driverless Team, a group of passionate programmers, mathematicians and excel sheet lovers on a route towards making fully autonomous cars a reality.
Their journey starts with the creation of a programme that will not only drive the car, but also recognise a circuit and map it. This is done using the well known Python programming language and combining it with cubic splines functions, which joins given points and creates curves that the car will use to guide itself. This is then tested on the computer using a virtual car, which you can see for yourself here under !
Virtual car driving autonomously in simulation
The programme is then uploaded into a remote controlled car and tested thoroughly. The system needs to recognize the cones that make up the track, and follow them with precision. However, a clear difference between the virtual and the remote controlled car’s behaviour is expected, as the physical car is subject to lots of environmental factors that are not present in the simulation, such as wind or bumps in the road for example. To limit these behavioural differences, a system called SLAM is used on the virtual car, simulating environmental factors in an attempt to programme the car’s reaction before sending it on the tarmac.
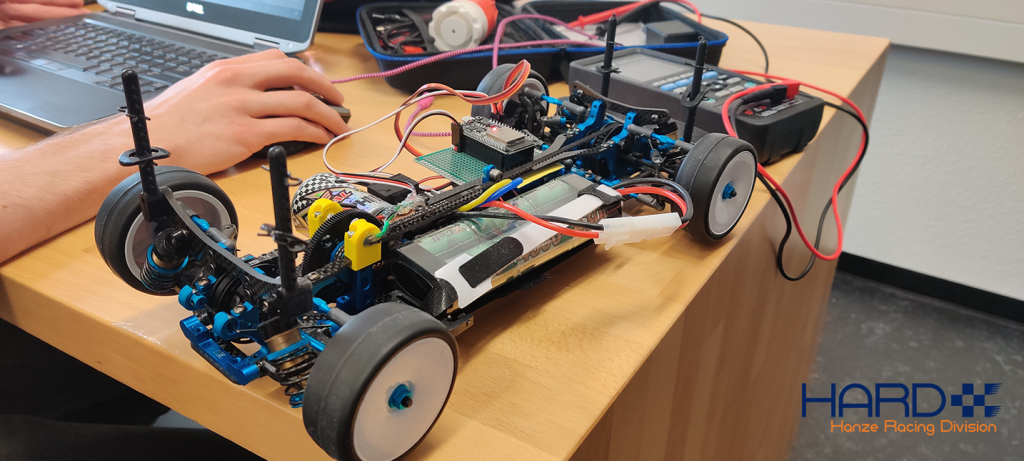
Remote controlled car used for tests